

研究テーマ
EMG信号を用いたサポート装具の制御
キーワード
外骨格ロボット,パワーアシスト,整体信号計測,動作推定
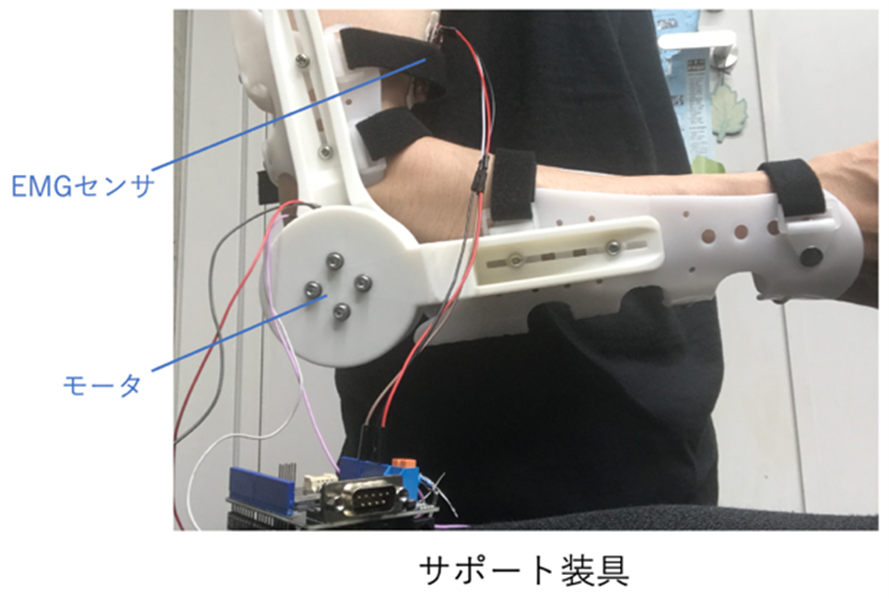
私は高齢者や筋力弱者を対象としたサポート装具に関する研究を行っており,日常生活に支障をきたす方々を支援することで,ムーンショットが目指す社会の実現を目標としています.ロボットがヒトの運動をサポートするには,これから起こる運動をリアルタイムで推定する必要があります.そこで,装着者の皮膚表面から発生する筋肉の微弱な電気信号(EMG)を読み取り,その信号に応じてモータの方向,トルク,スピード,アングルを制御し,ロボットの動きに反映させる方法を提案します.また,本研究では,装着者の意図した動作アシストだけでなく,楽に筋力増加が期待できるエキセントリック筋活動や,装着者に合わせた支援を行うことで,装着者の自己効力感を高めたり,使用することで筋力が回復するといった方法論やシステムについて研究を行っています.