

人生120年時代
人間は、自律的な動物です。1週間寝たきりになると15%の筋力が低下し、高齢者も若者も廃用症候群のリスクへと繋がっていきます。生物学的に、人間の寿命の限界は120才あたりといわれています。最新の医療だけでなく、知能化技術やロボット技術に支えられる人生120年時代のライフステージでは、60才で折り返し、仕事・社会貢献・自己実現・趣味・娯楽などが織り込まれた、人それぞれ価値観の異なる多彩なライフスタイルを送ることになります。つまり、学びを20年、働きを40年とすると、仕事の40年に相当する40年を健康寿命としてまっとうすることを考えると、60才からどのように生きていくのかを真剣に考えていかなければなりません。
(詳細説明はこちら)

認知化システム
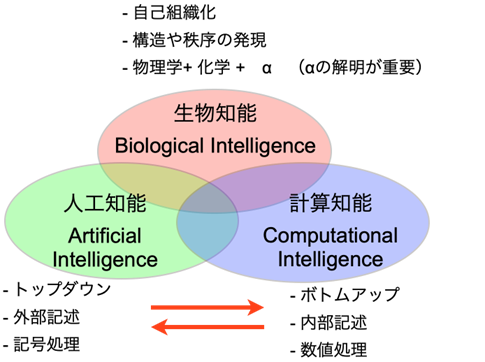
私たちは、知能のABC(ABC of Intelligence)という考えのもと、生物の知能に学びつつ、人工知能と計算知能の観点から知能化技術に関する研究開発を行ってきました。しかしながら、最近では、人工知能と計算知能の違いを明示的に議論するようなことは少なくなり、さらには、システムの知能化だけでなく、人間の認知全体を考えるようなシステム化に関する研究も増えてきました。一般に、認知モデルは、人間のようなセンシング・知覚・認知に関する活動を駆動するための「認知アーキテクチャ」と、実際に、あるタスクを遂行するために必要な「知識」から構成されます。これは、昨今における深層学習の学習済みモデルのように、ニューラルネットワークの「構造」としてのアーキテクチャと、学習済みの「パラメータ」をセットに扱っていることと同様です。私たちは、知能化技術に基づき、自律的に作動し、学習し、人間とコミュニケーションが取れるシステムを「認知化システム(cognizing systems)」と呼び、研究開発を進めています。Cognizeには、「be cognizant or aware of a fact or a specific piece of information」や「to select a pattern of information and assign it as an entity」という意味が含まれています。ここで、情報(information)という言葉がありますが、ベイトソンは、情報を「差異を生み出す差異(A difference which makes a difference)」と定義していますが*1、私たちは、「知覚的差異を生み出す物理的差異(A physical difference which makes a perceptual difference)」と考え、差異の差異化ができるような学習や記憶、想起ができるような能力を認知化システムのコアに捉えています。
(詳細説明はこちら)
*1グレゴリー・ベイトソン(佐藤訳)、精神と自然、思索社、1982。また、宮本らは、物理的な差異から認知的な差異を作り出すこと」と述べています(カルロ・ペルフェッティ(小池,宮本訳)、認知神経リハビリテーションの誕生、協同医書出版社、2021)。
移動とモビリティ
近年、様々な自動運転技術が注目される中、屋外の移動では、ラストワンマイル問題を解決するために、様々なパーソナルモビリティが開発されてきました。これに対し、屋内でも、例えば、敷居やユニットバスの段差の他、踏み台利用に起因する怪我、洗面台やキッチンの高さに起因する腰痛など、屋内での移動や動作に関する様々な問題があります。移動や動作が制限されると、日常生活に大きな支障をきたします。このことからも人間にとって自ら「動く」ことがどれほど大切であるのかがよくわかります。本研究では、「もう少し近ければ」や「もう少し低ければ」などの問題を、ラストワンフィート(Last one foot)問題と呼ぶことにします*2。ここでは、「足す」や「足りない」など、「足」という漢字の意味も含めて、物理的な身体にとって何かが足りないというような問題を対象とし、このような問題を解決するために、高さも含めた2.5次元移動・動作支援ロボットの開発が重要になっています。
次世代の個人の移動を目指すマイクロモビリティとして、電動のスケートボードやキックスクーターなど様々なスタイルの動作・移動支援が検討されています。生まれた直後から、電動のバウンサーやベビーカーなど、あらゆる動作や移動をシームレスに支援することが重要です。これらの技術の普及には、コストに見合った快適性と安全性が保証されなければなりません。特に、電動化から電動アシスト化、自動運転化へと進むにつれ、歩行者や自転車との衝突リスクや衝突時の安全性の確保など、さらなる議論を行うとともに、法律や保険に関する議論を行っていく必要があります。
現在、私たちは、ローカル5G(以下、L5G)環境活用研究として、「5Gを用いた超実時間モニタリングのためのロボット知能化基盤技術(URL)」に関する研究開発を行っています。一般に、5Gを用いた研究開発では、とにかく膨大なデータを分散的にもれなく計測・収集することを目的にしているものが多いのですが、通信速度や計算速度がどれほど向上しても、有限であるリソースを配分する問題を扱う必要があります。時々刻々と変化する環境の中で、「いつ」「どこで」「何を」「どのように」計測するかという状況依存的かつ能動的な観点から5Gの特徴を活かしたモニタリングに関する包括的な研究は少なく、本研究では、大容量・低遅延・同時多接続であるL5G環境における様々なモビリティを対象とし、超実時間でのトラッキング(見続ける)やモニタリング(見守る)、そして、快適性と安全性を考慮した人間への移動・動作支援を実現することを目的としています。具体的には、5Gの特徴を活かしたモニタリングに関する包括的な基盤研究として、「超実時間トラッキングイノベーション」「超実時間モニタリングイノベーション」「オンライン機械学習イノベーション」「オンラインロボット適応イノベーション」の4方向からのロボットの高度知能化基盤技術の確立を目指します。さらに、応用研究として、「実証実験用ロボットモジュール開発」「企業と連携した実証実験」、および社会技術研究として、「ロボット知能化イノベーションコンソーシアム」により、L5Gに関する研究成果の社会実装を図っていきます。
(参考文献:2022年4月9日付・16日付第7面連載「交通安全・医理工連携の今『世界一』への挑戦」第131回・132回、日刊自動車新聞)
(詳細説明はこちら)
*2英語では、one footとなりますが、日本語の単位として、「いち」フィートと読みますので、わかりやすく、日本語で書くときは、ラストワンフィートと読むことにしています。
道具とロボット
人間は、道具の発明とともに進化してきました。新しい道具の発明が新しいライフスタイルを作り、新しいライフスタイルがさらに新しい道具の発明を必要とするスパイラル的な技術革新が歴史を紡いできました。また、この技術革新の裏には、道具の利用により、人間をより賢くし、賢くなった人間が新しい道具を生み出す人間と道具の共進化があります。2050年には、どのような道具が身の回りにあるのでしょうか。ひょっとしたら、動作や移動に関する道具は全て衣類に埋め込まれ、全ては「着る」ロボットになり、現在のような多様なモビリティのカタチを考える必要がなくなっているのかもしれません。
さて、現在、ムーンショット型研究開発プロジェクト目標3「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」において「活力ある社会を創る適応自在AIロボット群」に関する研究開発が進められています(URL)。このプロジェクトでは、すべての人がすこやかに生きるためのロボット社会の実現を目指しています。例えば、上述の「移動とモビリティ」では、電動バウンサーについてふれましたが、首の据わっていない赤ちゃんを、時には柔らかく、時にはしっかりと、母親のように暖かく包み込むことができるベビーホルダー(着るロボット)があれば、バウンサーからベビーカー、チャイルドシートへの移乗をワンタッチで安全かつ、快適にできるようになります。このように、人生120年時代のモビリティを支えるロボット技術も重要となります。
このプロジェクトの中で、私たちは、トレーラ型リビングラボを構築し、人間の日常生活動作計測から意図推定、行動の支援・維持・改善・獲得を行うロボット技術と知能化技術を開発しています。単なる支援では、認知・運動能力の低下につながるため、認知・運動能力の維持・改善のための支援、さらには、その先にある、今まで、できなかった何かができるようになるための支援、ひいては、自分の「できる」を育むことを目指し、社会的学習理論で議論されている自己効力感をコアに、個々人にあわせた適応自在AIロボットの開発を行っています。また、全てのサービスをロボット化しようとしているわけではなく、人間のぬくもりや人間が自ら「やりたい」と思う気持ちを大切にしながら、その時代のニーズにあわせた人間とロボットのベストミックスを実現していきます。トレーラ型リビングラボを、高齢者施設や病院の駐車場に持って行き、動くことが困難な人々に、様々なロボットやモビリティを体験してもらい、外の世界に出るきっかけになればと願っています。自分では気づけなかった「できる」こと、動作支援や移動支援があれば「できる」ことを自分自身でしっかりと理解することが、人生120年時代の要となります。さらに、これらの技術は、高齢者にも適用でき、日常生活や移動に関する認知・運動能力の計測や評価は、必要なモビリティの安全機能の取捨選択にも役立ちますし、免許返納の審査にも役立てることができます。あわせて、自らの認知・運動能力を正しく理解することは、交通事故の被害者にならないための危険回避や家庭内事故の回避へとつなげることもできます。
(参考文献:2022年4月9日付・16日付第7面連載「交通安全・医理工連携の今『世界一』への挑戦」第131回・132回、日刊自動車新聞)
(詳細説明はこちら)
